无感FOC电机驱动
相关仿真模型地址:ChenZR0509/FOC-: 存放FOC驱动学习过程中用到的资料以及笔记
第一部分 扩展卡尔曼滤波算法
第一章 扩展卡尔曼滤波算法方程组
状态预测方程:x^n+1∣n=x^n∣n+fnx^n∣n+Bnun
协方差预测方程:Pn+1∣n=AnPn∣nAnT+Q
观测方程:zn=h(xn)
状态更新方程:x^n∣n=x^n∣n−1+Kn(zn−h(x^n∣n−1))
协方差更新方程:Pn∣n=(I−KnHn)Pn∣n−1
卡尔曼增益方程:Kn=Pn∣n−1HnT(HnPn∣n−1HnT+Rn)−1
第二章 扩展卡尔曼滤波FOC电机驱动应用
-
已知永磁同步电机在α轴和β轴下的电压平衡方程为:
{Uα=Riα+Ldtdiα−weψfsinθeUβ=Riβ+Ldtdiβ+weψfcosθe
-
以电流为状态,故而可得其状态方程为:
{dtdiα=−LRiα+L1Uα+L1weψfsinθedtdiβ=−LRiβ+L1Uβ−L1weψfcosθe
-
仅考虑匀速转动的情况可得转速和角度方程为:
{dtdwe=0dtdθe=we
-
联立可得:
⎩⎪⎪⎪⎨⎪⎪⎪⎧dtdiα=−LRiα+L1Uα+L1weψfsinθedtdiβ=−LRiβ+L1Uβ−L1weψfcosθedtdwe=0dtdθe=we
-
特取非线性状态空间方程格式为:
{x˙=f(x)+Buy=Cx+Du
-
各变量取值如下所示:
状态变量:x=⎣⎢⎢⎢⎡iαiβweθe⎦⎥⎥⎥⎤
输入变量:u=[UαUβ]
输出变量:y=⎣⎢⎢⎢⎡iαiβweθe⎦⎥⎥⎥⎤
-
测量方程不同于输出方程,我们仅需测量输出信号的前两个元素即可,因此:
观测方程:zn=h(xn)=Cx+Du=Hx
测量变量:z=[iαiβ]
-
因此可得:
fn=ΔT⎣⎢⎢⎢⎡−LRiα+L1weψfsinθe−LRiβ−L1weψfcosθe0we⎦⎥⎥⎥⎤
An=⎣⎢⎢⎢⎡1−LRΔT00001−LRΔT00L1ψfsinθeΔT−L1ψfcosθeΔT11L1weψfcosθeΔTL1weψfsinθeΔT01⎦⎥⎥⎥⎤∣∣∣∣∣∣∣∣∣xn=x^n∣n
B=⎣⎢⎢⎢⎡L10000L100⎦⎥⎥⎥⎤
Bn=BΔT=⎣⎢⎢⎢⎡L1ΔT0000L1ΔT00⎦⎥⎥⎥⎤
C=⎣⎢⎢⎢⎡1000010000100001⎦⎥⎥⎥⎤
D=⎣⎢⎢⎢⎡0000⎦⎥⎥⎥⎤
H=[10010000]
第三章 扩展卡尔曼滤波M文件编写
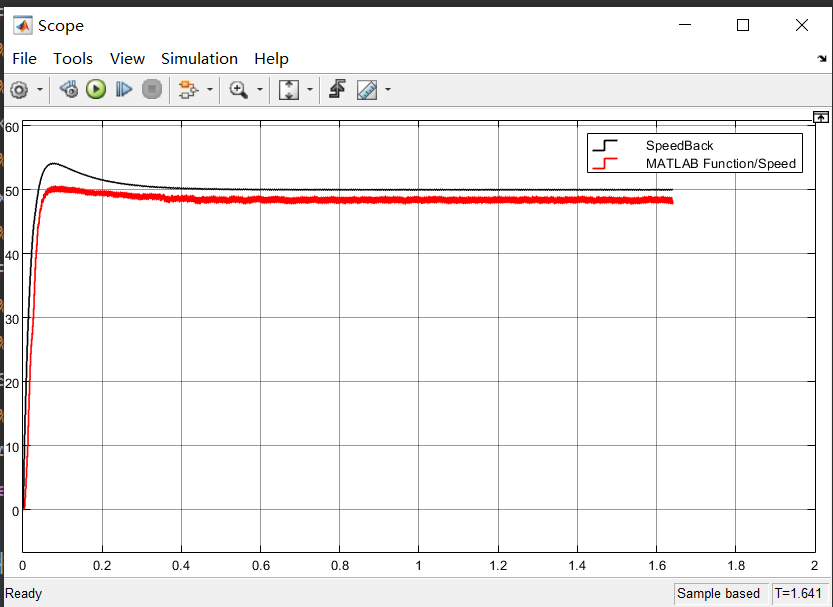
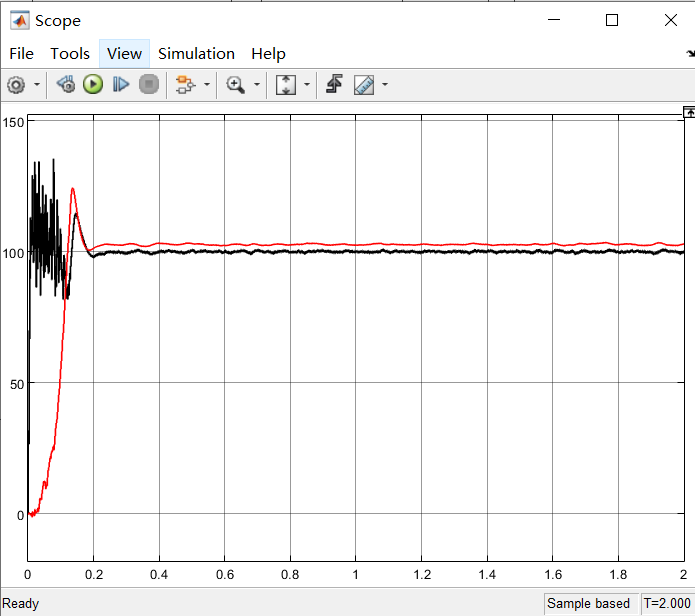
旨在不使用编码器等传感器以预测电机转动角度和速度等信息;
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
| function [Speed,Angle] = EKF(ualpha,ubeta,ialpha,ibeta,R,L,Flux,Pn)
persistent Flag x Pm;
if isempty(Flag)
Flag = 1;
x=zeros(4,1);
Pm=diag([0 0 0 0]);
end
Qm=[0.001,0,0,0; 0,0.001,0,0; 0,0,0.001,0; 0,0,0,0.001];
Rm=[0.001,0; 0,0.001];
Ts=1e-6;
Am=[-R/L,0,Flux/L*sin(x(4)),Flux/L*x(3)*cos(x(4));
0,-R/L,-Flux/L*cos(x(4)),Flux/L*x(3)*sin(x(4));
0,0,1,0;
0,0,1,1];
Bm=[1.0/L,0; 0,1.0/L; 0,0; 0,0];
Hm=eye(2,4);
Fm=[-R/L*x(1)+Flux/L*x(3)*sin(x(4));
-R/L*x(2)-Flux/L*x(3)*cos(x(4));
0
x(3)];
AmHat=eye(4)+Ts*Am;
BmHat=Ts*Bm;
FmHat=Ts*Fm;
u=[ualpha;ubeta];
z=[ialpha;ibeta];
xHat=x+FmHat+BmHat*u;
zHat=Hm*xHat;
PmHat=AmHat*Pm*AmHat'+Qm;
Km=PmHat*Hm'/(Hm*PmHat*Hm'+Rm);
x=xHat+Km*(z-zHat);
Pm=(eye(4)-Km*Hm)*PmHat;
Speed=x(3)/Pn;
Angle=rem(x(4),2*pi);
end
|